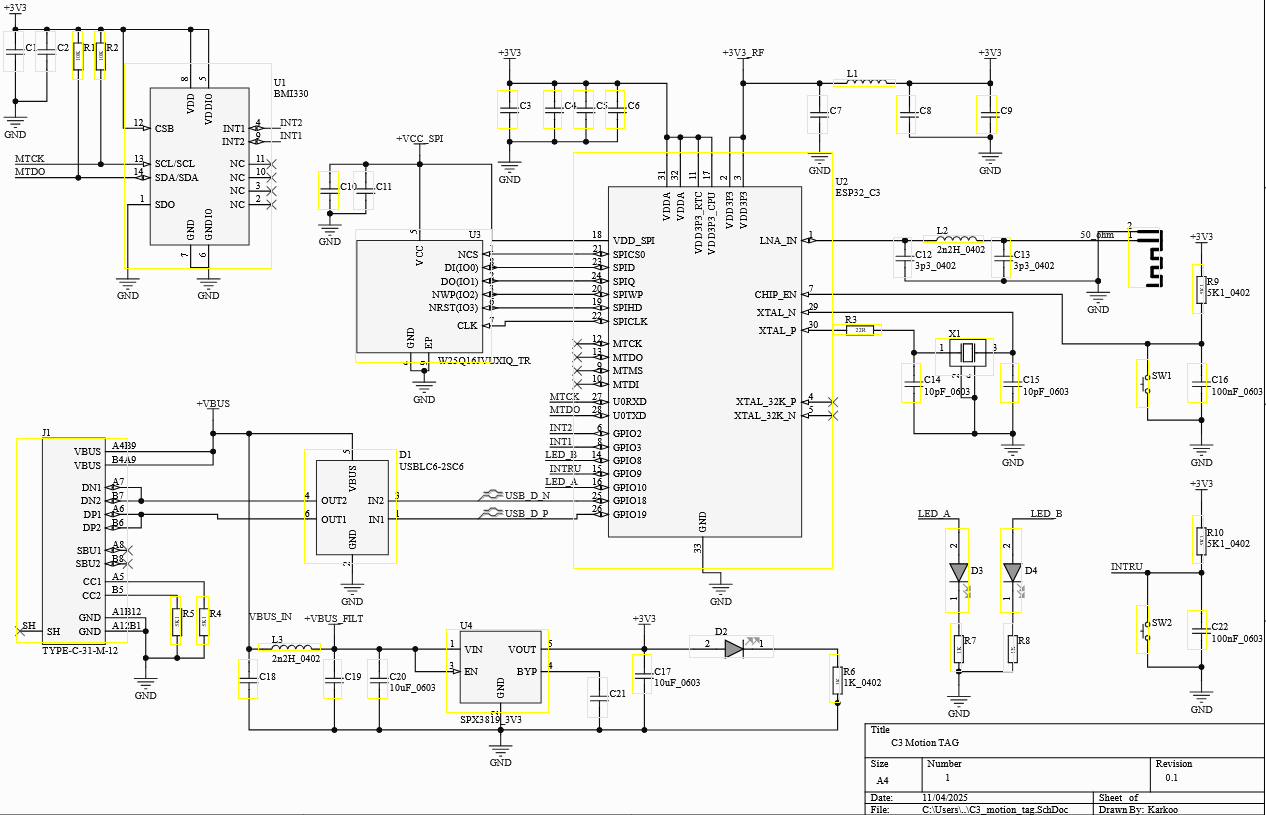
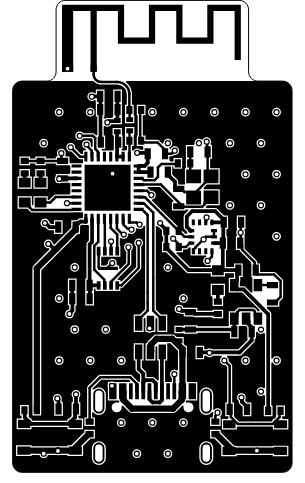
C3 Motion Tag with Embedded antenna
Carte PCB avec un capteur IMU à 6 axes pour détecter de petites vibrations et fournir un retour d’information d’un bras robotique à 6 axes.
Passionné d’électronique et de robotique depuis toujours, je suis actuellement en dernière année de Master Mécatronique Avancée à Polytech Annecy-Chambéry. Mon parcours m’a permis de développer une solide expertise en conception de circuits imprimés, programmation de systèmes embarqués et développement de robots autonomes sous ROS. Ce qui me motive vraiment ? Transformer des idées en systèmes fonctionnels, que ce soit un robot de compétition RoboCup ou un capteur IoT miniaturisé. J’aime particulièrement les défis qui demandent de jongler entre hardware et software, et je m’épanouis dans les projets collaboratifs où créativité et rigueur technique se complètent
Carte PCB avec un capteur IMU à 6 axes pour détecter de petites vibrations et fournir un retour d’information d’un bras robotique à 6 axes.
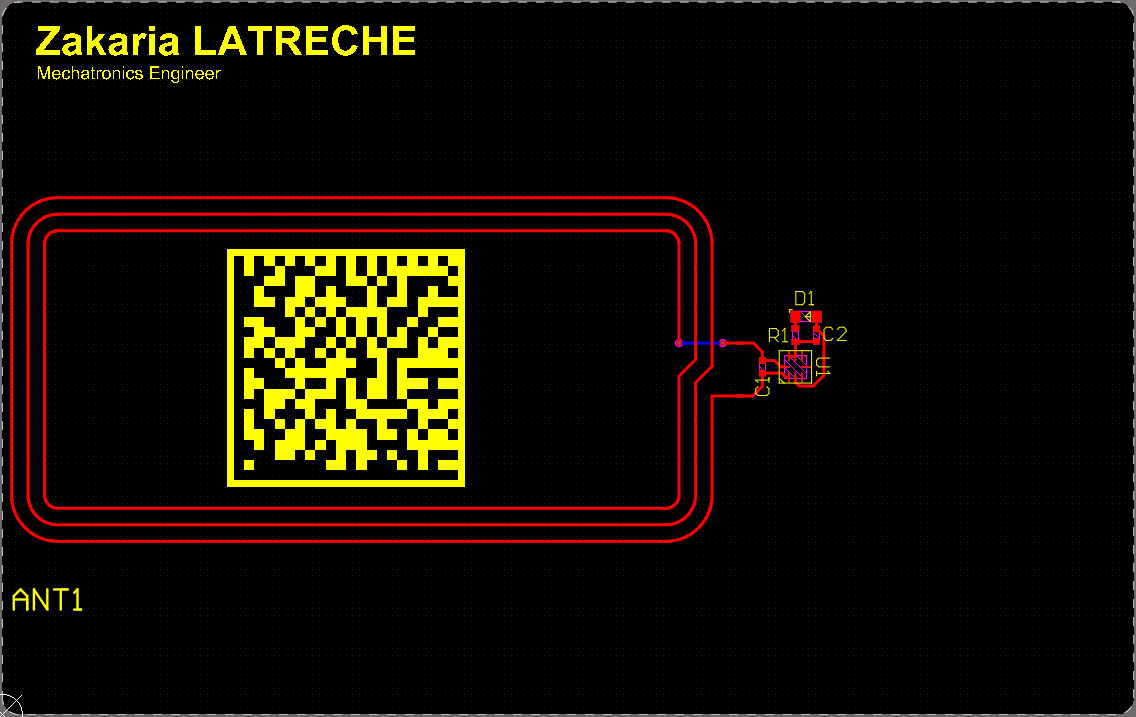
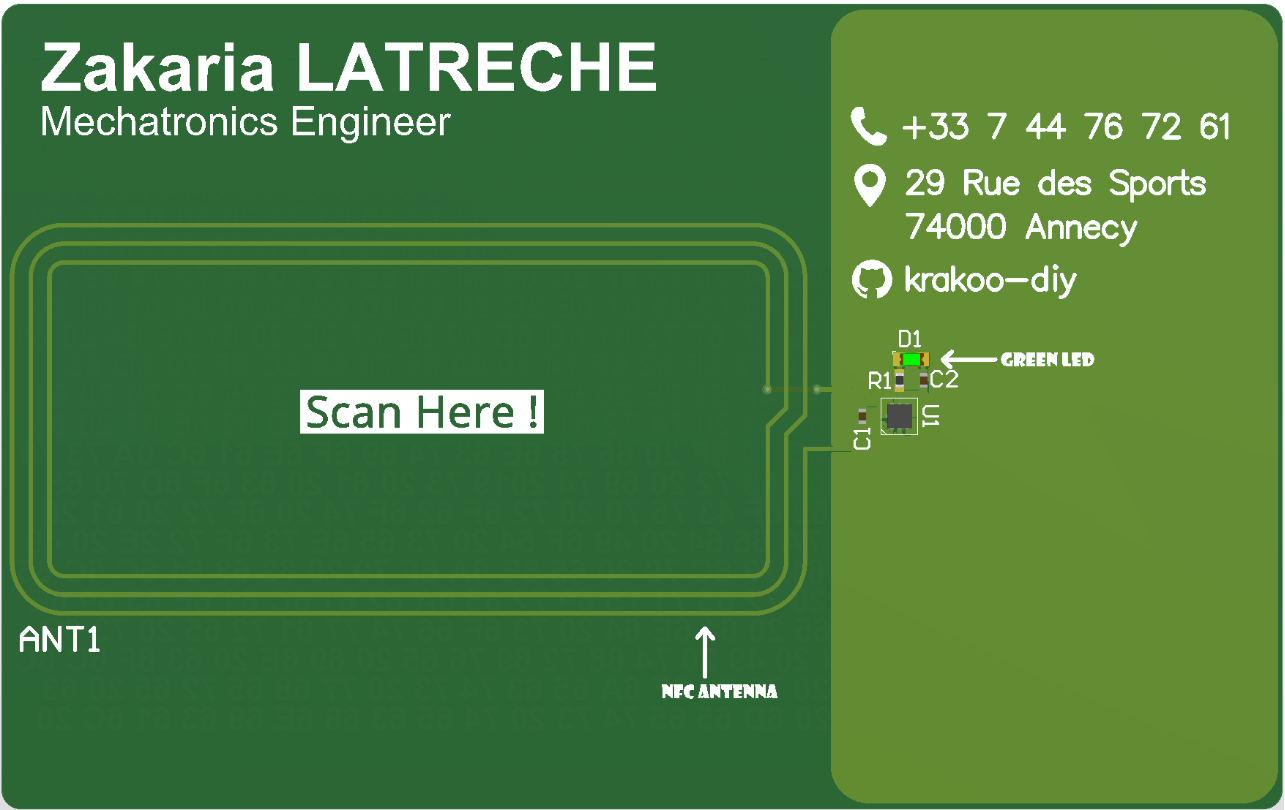
PCB simple avec antenne NFC accordée à 13,56 MHz. Circuit NXP I²C-plus avec récupération d’énergie, LED verte et capteur capacitif.
Robot foot sous ROS (C++/Python) : mécanisme de tir, SLAM LiDAR, planification de trajectoire, vision couleur temps réel.

UR3↔ROS via Ethernet, pilotes officiels, .urcap + calibration .yaml ; contrôle cinématique sous RViz & MoveIt (tests temps réel, Linux).
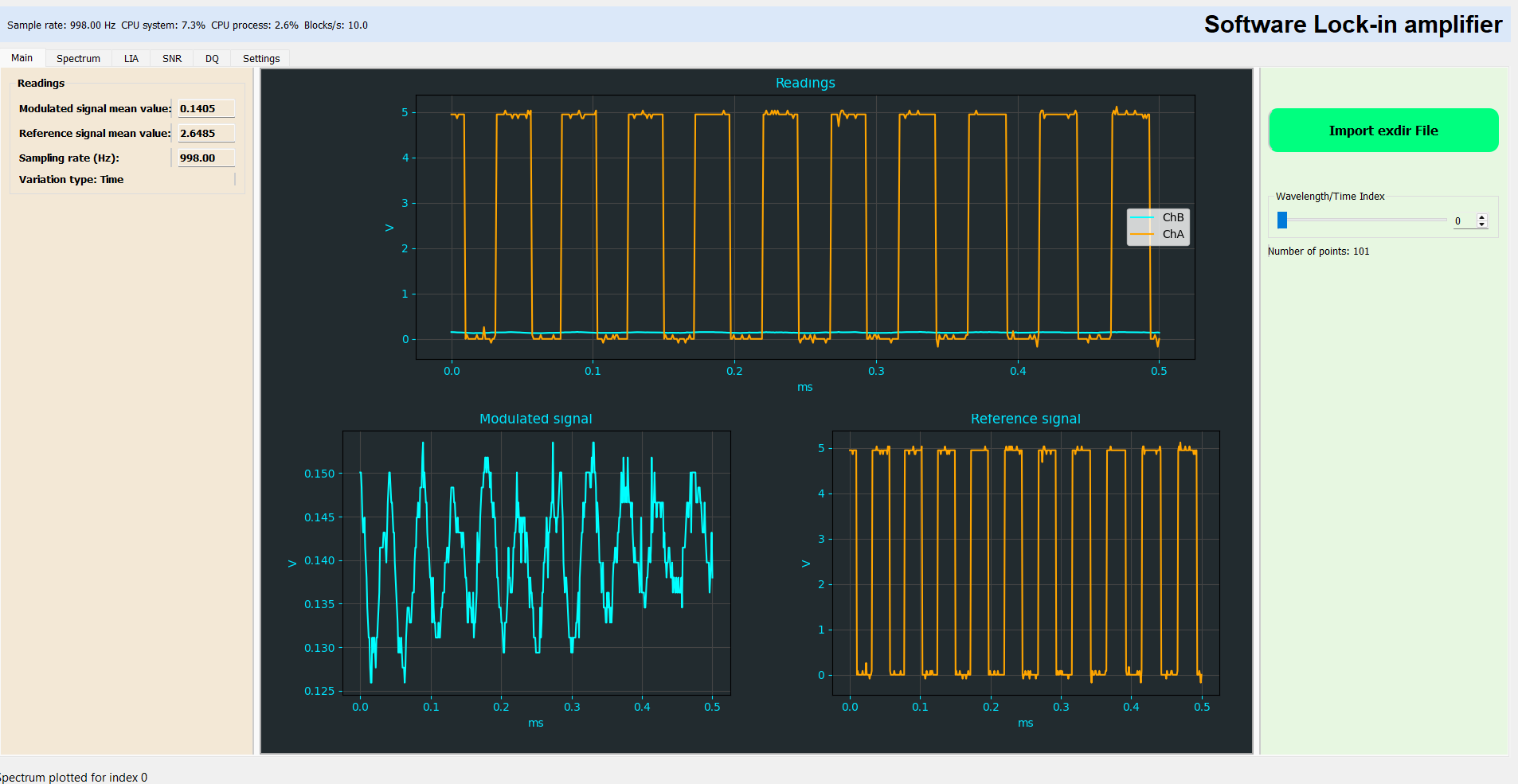
Acquisition temps réel (Python GUI + SDK PicoScope) et traitement ; calcul précis du SNR pour matériaux non linéaires.
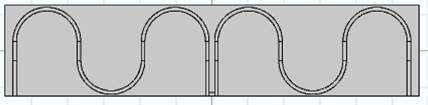
Module IMU+MCU sur PCB 4 couches, antenne méandre IFA 50 Ω ; Wi-Fi/BLE et BOM optimisée (Altium).
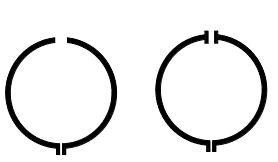
Antenne circulaire 2,45 GHz : simulation COMSOL (S11/S12), optimisation paramétrique, layout & adaptation d’impédance (Altium).
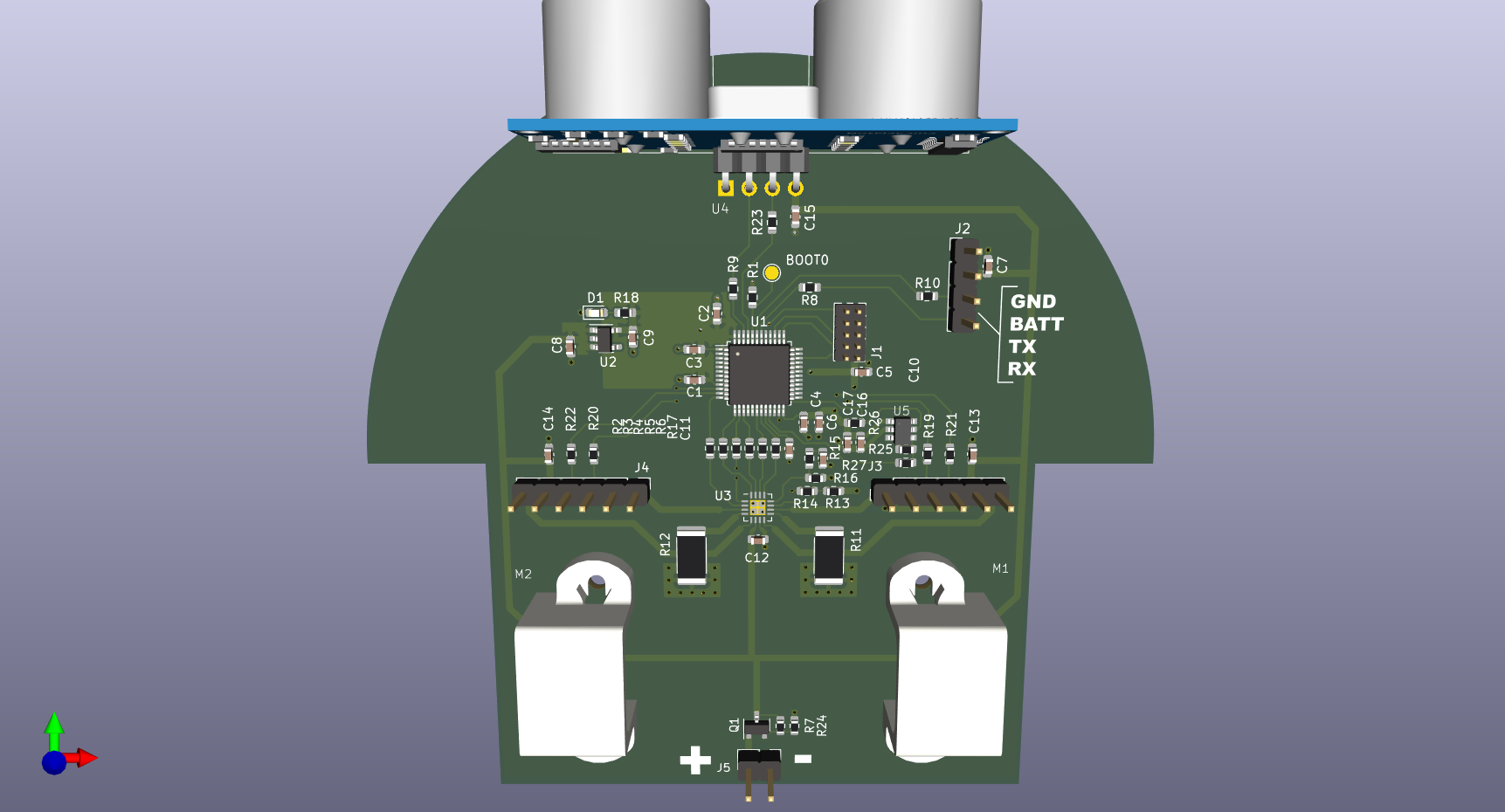
STM32 (C) avec SPI/UART/I²C ; PCB 2 couches intégrant capteurs/actionneurs pour déplacement autonome.
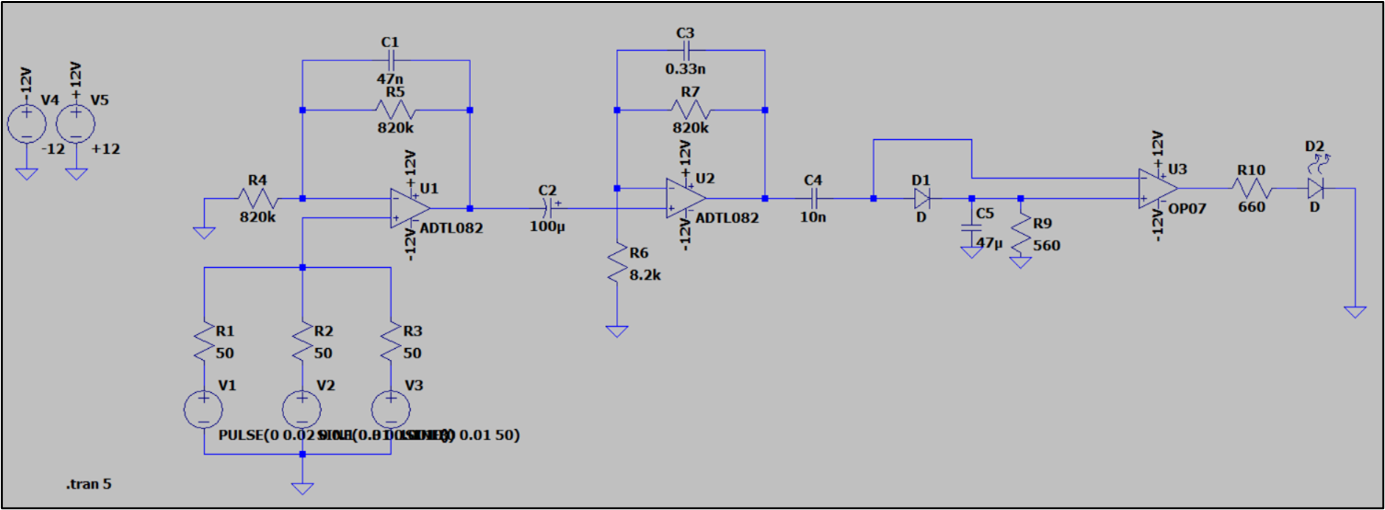
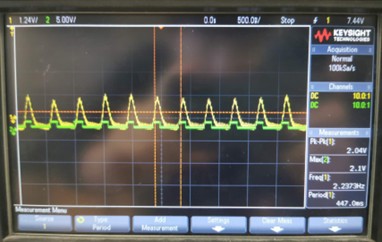
Cardio-tachymètre (LED IR + photodiode, filtre actif, ampli, comparateur). Simulation LTspice et validation expérimentale (~90 BPM).

Arduino (C/C++) : détection, tri, comptage, broyage ; IHM et intégration mécatronique.
ESP32, capteurs LDR, servomoteurs ; optimisation d’orientation pour meilleur rendement.
Email : zakaria.latreche@etu.univ-smb.fr